Rhythm Robot progress
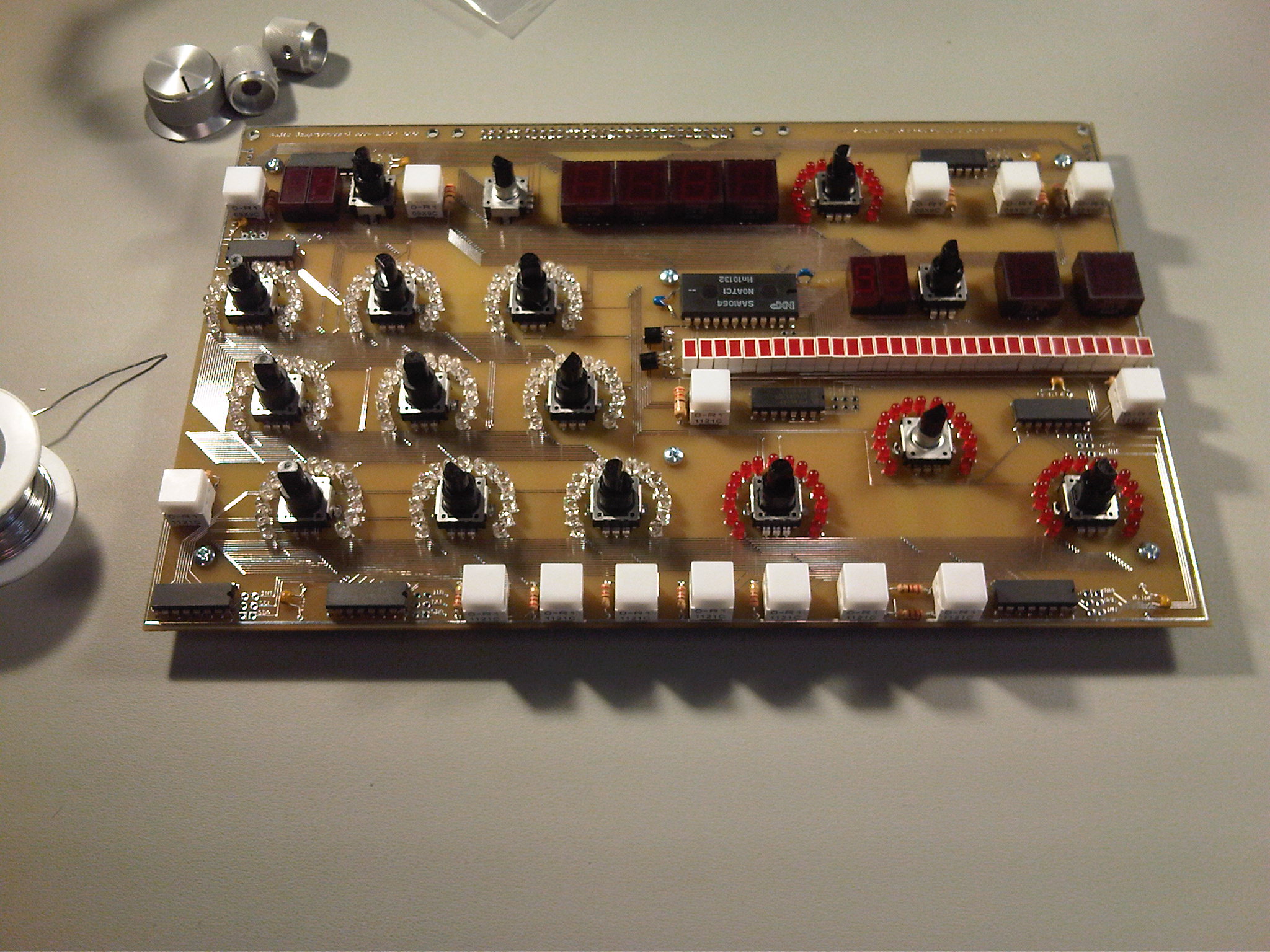
I’ve soldered all the components onto the main Rhythm Robot board. This is the part you actually interact with, containing all the rotary encoders (sixteen of them), the LEDs (322 of them), the push-buttons (fifteen), and 7-segment displays (ten). It was a lot of work just getting all the parts together – now I begin the “bring-up”, testing different subsections of the circuit to make sure they work the way I expect them to.
Once that’s done, it’s time to write code. I am not going to bring over much of the code from the first rhythm robot prototype, because – as is inevitable in software – I’ve come up with rather better ways of doing it. On top of that there is a whole pile of new functionality in this device; it was originally going to be three separate boxes, after all.